Collaborative Robotics Safety – Part One (Sub-Sea)
What could possibly go wrong? Pretty much everything. Functional Safety looks at every aspect of the microcosm of active safety and control mechanisms, interfaces and architectures. Hazard detection & prevention defines its core business. Ignorance (as in non-compliance) comes at a high price tag: the consequences can be dire and extremely far-reaching. Sub sea robotics safety has come a long way, although the complexity of its machinery does not yet match that of topside robotics installations, and the scope of tasks appears to be much simpler. At the moment, that is a good thing: human interaction makes up for a large part of sub sea robotics activities, much of the multi-tasking processes depend on human input. As we move forward to a more sophisticated robotics subsea task management, functional safety will play a much bigger role. That said, a multifaceted offshore risk management ahead of every daily task draws from a vast archive of job safety analyses, lessons learned and project safety seminars routinely performed ahead of every project.
We chose the animation clip below to demonstrate the illusion of apparent simplicity of sub sea robotics action. Below the animation you will find the same task carried out in a real subsea environment. What could possibly go wrong? Everything. Lets not get into subsea asset & environmental damage, to begin with. In this scenario, there are no divers involved, hence the collaborative robotics – human safety environment is not fully demonstrated. We will get to that later.
Environmental parameters, as aptly demonstrated in the real world clip, throw a spanner in the works, as regards the next generation, semi or fully autonomously operating subsea robotic vehicles. It’s a similar challenge to what’s happening onshore. And yet, increased efficiency will be the main driver for ASRVs.
Currently, there is a large focus in research on the development of navigation, guidance and control for autonomous underwater vehicles (AUVs, AIVs). It should be noted, these do not require any conventional operator input. Future demand for subsea inspection, sea-floor surveys, maintenance and repair (IMR) operations with non-tethered systems has seen a steady growth in the offshore market. A future scenario: AUVs/AIVs stationed on the seafloor in subsea garages. However, IMR operations still heavily rely on vessel supported Work ROVs in a typical, often multi-WROV SIMOPS scenario. Lest we forget, less favorable environmental scenarios in shallow waters with high tidal movements, or extremely poor visibility close to soft seabeds, or any combination of adverse conditions for that matter, such as rip tides and subsea “jet stream” conditions, will require complex risk modeling and data computation. Think real bad weather for aviation, and you get the picture.
The next generation of autonomous subsea robotic vehicles would demonstrate the capability of carrying out modular task portfolios, without human intervention (operator). When working in a collaborative environment, these robotic vehicles would be capable of following instructions, such as stop, pause, release, hold, forward, reverse, turn, up, down instructions signaled by the diver or (voice)-instructed by the project system supervisor in a multi vehicle or SIMOPS environment.
Unlike typical topside industrial robots that operate behind safeguarding (FSU), collaborative autonomous subsea robotic vehicles (ASRV) should be designed to work effectively directly alongside divers in a subsea setting, making it possible to deploy in environments which have historically been off-limits to robotic automation (i.e., inside subsea structures). ASRVs would combine a number of unique technologies designed to allow deployment without some of the traditional safeguarding described in ANSI, ISO, or other topside safety standards, based on the application’s risk assessment, such as physical interaction between a diver and the ASRV. Minimizing forces, avoiding accidental contact with subsea assets.
COBOTS: FUNCTIONAL SAFETY MANAGEMENT
ASRVs would meet the requirements of a collaborative robot (COBOT) that is power and force limited by inherent design as described in ISO 10218-1: 2011, section 5.10.5. The most recent edition of ISO 10218-1 does not include power and force limiting collaborative requirements, and instead points to the requirement in ISO 10218-2 requiring a risk assessment of the entire robotic application, referring to Technical Specification ISO TS 15066:2016 for further guidance. In fact, ISO 10218-1 & -2 represent the international robot safety standards, adopted around the globe, i.e., ANSI RIA R15.06-2012 being the U.S.-national adoption of ISO 10218-1 & 2.
Some must-have ASRV safety elements:
Safety by Design: Operate at human-equivalent speed(s) / modes, where required and limited by inherent design. Operate at various pre-set task portfolio speeds & torque settings.
Machine Safety: Protective features which govern task portfolio operation and protect those working around them, where applicable, as well as the subsea asset (structure, template, manifold, wellhead). Intelligent emergency stop & reset safety functions (learning capability).
Contact Detection: Actuators that directly measure torque at every joint, monitoring for sudden impacts, soft target obstructions, or excess forces or torques and stopping the robot.
Diverse Internally Checking Sub-System Architecture: Various sub-systems disable motor power and enable joint brakes if a control error or failure is detected.
Sensing and Behavior: Intent Signaling of the direction of the next motion, auto-follow instruction sensing.
Industrial implementation of model-based control algorithms in WROV control appears to be limited. Complexity is linked to the identification of hydrodynamic parameters of the mathematical models describing the vehicle-manipulator system. This has been a constraint in the development of more advanced control structures and implementation in commercial systems. On the contrary, development of algorithms for station-keep was an important breakthrough for Work ROV (WROV) systems. Station-keep yielded a first major step towards autonomy in WROV operations as it enables precision control of the ROV independent from manipulator control, allowing the operator to “decouple” from flying duties, hypothetically. In the real world, a manipulator operator and a pilot are employed to control the WROV, however, reduction to a one-operator scenario has become a reality in station-keep mode. Development of model-based control of manipulator arms seem less complex.
Goal orientation-logic driven vehicle control is required where portfolio task profiles are uploaded in order to yield task fulfillment autonomously. Development of real-time virtual environment models including collision detection will be an important part of future development for more efficient remote and autonomous operations. System architecture developed for GO logic driven solutions may exploit solutions developed for other applications.
Arguably, there exists a large gap between research and current WROV intervention operations, mostly performed manually by a team of operators. In addition, subsea templates lack the design for even semi-autonomous intervention. Moreover, the use of virtual environment models and sensors for effective ROV/AUV collision avoidance is often limited to scientific applications. Shortcomings, related to the realization of autonomous subsea intervention operations utilizing WROVs, remain at large, not to mention the complexity of multiple WROV operations. The use of AUV/AIVs is currently limited to a small range (albeit growing) of non-construction, survey-related missions.
A key challenge prevails: to optimize the design of future subsea equipment in order to enable autonomous IMR operations. This includes optimization of tool design, tool exchange systems, and moreover, the design of valves, sensors etc. used for intervention, to name but a few, no matter how simple the task may be. Autonomous ROV systems will require systematic, multi-disciplinary risk modeling via fault tree, failure & preventive analyses, as well as the implementation of integrated hazard identification (HAZID) prevention systems, such as collision avoidance systems, similar to TCAS in aviation.
Hence, a more advanced type of modeling will be required. Typically, an AUV/AIV runs on a pre-programmed course of action, meaning the vehicle will have a limited degree of autonomy. While some tasks are completely autonomous, others require interference, albeit occasionally, by the operator. Currently the lack of real-time data available to the operator/supervisor during AUV missions, roots in the absence of broadband acoustic links between the AUV and the launch vessel. WROV transponders have a limited range of approx. less than 1 kilometer.
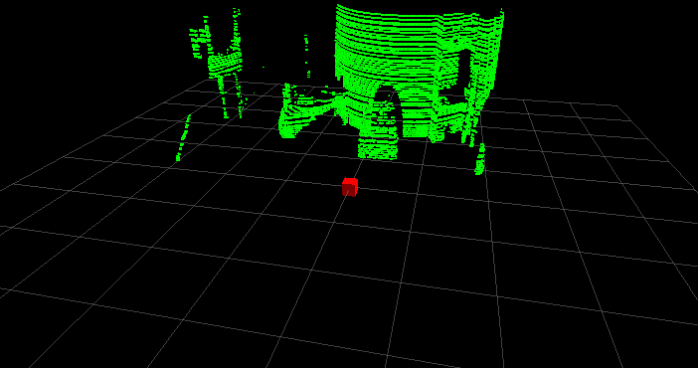
Solutions for dynamic 3-D obstacle recognition are needed, thus demanding algorithms for Ultra High Resolution Definition Sub-Sea Lidar Data Driven 3-D Navigation Systems (UHD SLDD NAV), featuring built-in 3-D ground/structure proximity scanning & warning systems.
This slideshow requires JavaScript.
Another key challenge: tackling the complexity of exchangeable subsea equipment (tools) in order to enable autonomous IMR operations – initially perhaps on a routine task portfolio level. The design of valves, couplings, connectors, seals and so forth on subsea structures will have to be optimized.
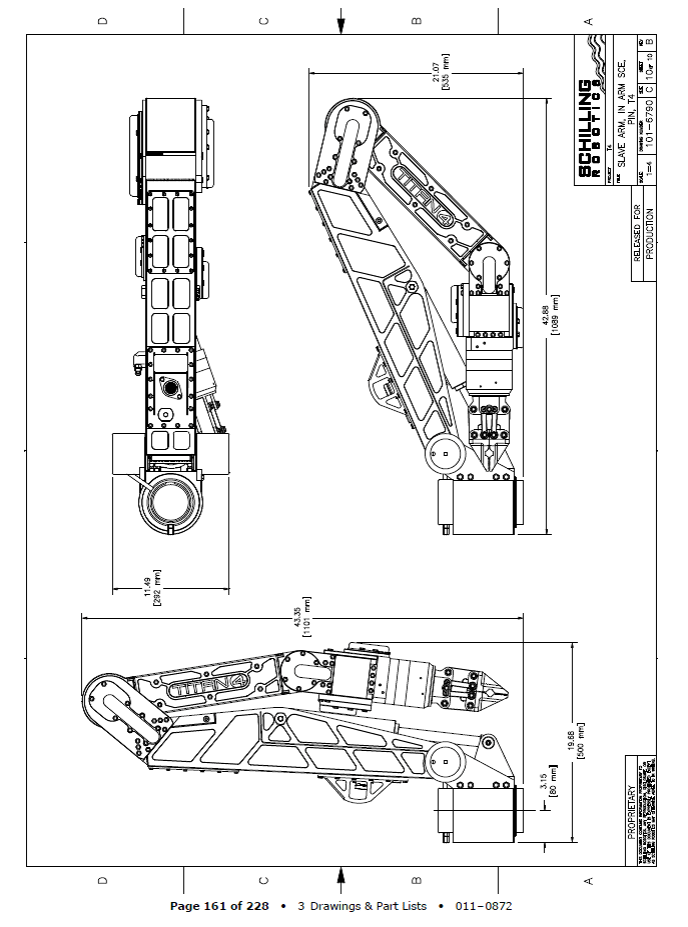
We conclude: Topside systems (Autonomous Vehicle Guidance Systems), translated into the realm of subsea construction and IMR in a truly autonomous subsea robotic vehicle (ASRV) scenario, will require risk modeling on a large scale, and a two prong approach: 1. Multi-layered, all-encompassing algorithms for a truly autonomous WROV guidance & 3-D navigation system, as well as tool-specific task portfolio operations. 2. 3-D template modeling and data capture of subsea structures, utilizing the most advanced laser scan technologies, some of which are shown in this blog.